







One stop solution 360° full automatic smart vacuum cleaning robot smart robot mower artificial intelligence curtain robot





Detail
We understand the so-called intelligent robot in a broad sense, and its most profound impression is that it is a unique "living creature" that performs self-control. In fact, the main organs of this self-control "living creature" are not as delicate and complex as real humans.
Intelligent robots have various internal and external information sensors, such as vision, hearing, touch, and smell. In addition to having receptors, it also has effectors as a means of acting on the surrounding environment. This is the muscle, also known as the stepper motor, which moves the hands, feet, long nose, antennae, and so on. From this, it can also be seen that intelligent robots must have at least three elements: sensory elements, reaction elements, and thinking elements.

We refer to this type of robot as an autonomous robot to distinguish it from the previously mentioned robots. It is the result of cybernetics, which advocates the fact that life and non life purposeful behavior are consistent in many aspects. As an intelligent robot manufacturer once said, a robot is a functional description of a system that can only be obtained from the growth of life cells in the past. They have become something we can manufacture ourselves.
Intelligent robots can understand human language, communicate with operators using human language, and form a detailed pattern of the actual situation in their own "consciousness" that enables them to "survive" in the external environment. It can analyze situations, adjust its actions to meet all the requirements put forward by the operator, formulate desired actions, and complete these actions in situations of insufficient information and rapid environmental changes. Of course, it is impossible to make it identical to our human thinking. However, there are still attempts to establish a certain 'micro world' that computers can understand.
Parameter
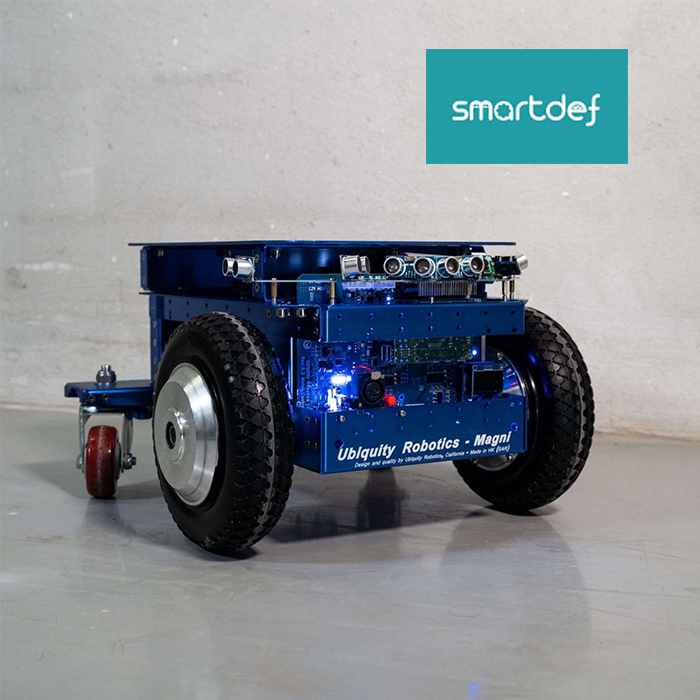
|
Payload |
100kg |
|
Drive System |
2 X 200W hub motors - differential drive |
|
Top speed |
1m/s (software limited - higher speeds by request) |
|
Odometery |
Hall sensor odometery accurate to 2mm |
|
Power |
7A 5V DC power 7A 12V DC power |
|
Computer |
Quad Core ARM A9 - Raspberry Pi 4 |
|
Software |
Ubuntu 16.04, ROS Kinetic, Core Magni Packages |
|
Camera |
Single upward facing |
|
Navigation |
Ceiling fiducial based navigation |
|
Sensor Package |
5 point sonar array |
|
Speed |
0-1 m/s |
|
Rotation |
0.5 rad/s |
|
Camera |
Raspberry Pi Camera Module V2 |
|
Sonar |
5x hc-sr04 sonar |
|
Navigation |
ceiling navigation, odometry |
|
Connectivity/Ports |
wlan, ethernet, 4x USB, 1x molex 5V, 1x molex 12V,1x ribbon cable full gpio socket |
|
Size (w/l/h) in mm |
417.40 x 439.09 x 265 |
|
Weight in kg |
13.5 |
Related Products
-

View larger image Add to Compare Share AS3786 ...
-

Robots humanoids smart intelligent gesture sens...
-

1-8 loop LPCB High Quality Addressable Fire Ala...
-

7kw 11kw home wallbox ev charging station 14kw ...
-

50 kw 300kw 480kw ev quick charging station cha...
-

New Smart Design Intelligent Control Food Deliv...